The synchronous generator converts mechanical energy from the turbine into electrical energy. This type of generator requires a winding carrying direct current (or in small sizes a series of permanent magnets) to establish the magnetic flux. Mostly in all machines this excitation winding (known as the field winding) is carried on the rotor, which for a 50 or 60 Hz output must rotate at the synchronous speed.
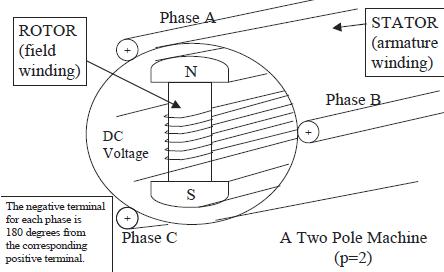
The synchronous generator has two parts:
- Stator: Stator carries 3 (3-phase) armature windings, AC, physically displaced from each other by 120 degrees
- Rotor: Rotor carries field windings, connected to an external DC source via slip rings and brushes or to revolving DC source via a special brushless configuration.

There are two types of synchronous generator based on the type of rotor used;
1)Turbogenerators
This family of machines use a cylindrical rotor in which the field winding is housed in axial slots. They are invariably driven by a steam turbine or a gas turbine. At ratings below 60MW a gear box may be used to provide a rotational speed of 3600 (2 pole) or 1800 rev/min(4 pole) to provide power at 60 Hz, or 3000 rev/min (2 pole) or 1500 rev/min (4 pole) to provide power at 50 Hz. Alternatively, and especially at higher power ratings the generator is directly driven by the steam or gas turbine. The rotors will thus have either two or four poles. Smaller machines may use a laminated construction for the rotor while larger machines will use a forged rotor. A feature of these machines is that their length is several times their diameter. Power outputs range from a few megawatts up to about 1500MW. The machine is cooled by circulating air or hydrogen over the active parts or water through the windings. Hydrogen was commonly used for outputs greater than about 50MW; water was, and still is, used for the stator winding with outputs exceeding about 200MW. Air-cooled machines are now available upto almost 200MW.
2) Hydrogenerators
This type of generators uses salient pole type rotor which are driven by water turbines at a speed in the range 50 ±1000 rev/min. The speed depends on the type of turbine, which in turn depends on the head and the flow rate of the water available. At low speeds, the permissible rotor diameter will be several times its active length. Generally, the largest allowable diameter of rotor is used to maximize the machine's inertia which is an important part of governing the water turbine. Outputs up to 800MW have been achieved. A small high-speed unit will have a horizontal shaft, but for reasons of mechanical construction and stability larger machines have vertical shafts.
The synchronous generator is so-named because it functions properly only at synchronous speed that. Synchronous speed can be defined as the speed for which the induced voltage in the armature (stator) windings is synchronized with (has same frequency as) the network voltage.